Hi, I'm Hussein
Robotics Engineer
Currently working at Siemens and pursuing my PhD at Rutgers University, The State University of New Jersey
Contact MeAbout Me
Hello
I am passionate about science and robotics. Currently pursuing my PhD in the Mechanical and Aerospace Engineering Department at Rutgers University. Specializing in 5G Industrial Robtics, Cloud Computing, Internet of Things (IoT), and Machine Learning.
of experience
projects
of work
Skills
My technical levelModeling and Simulation
MATLAB
81%SIMULINK
73%Python
65%ROS
20%Technical Computing
LINUX
40%Bash Scripting
30%Networking
30%Mechanical Design
SolidWorks
77%Fusion360
75%Inventor
82%Achievements
My personal journeyPhD
Mechanical & Aerospace Engineering
Rutgers University, NJ
Master's of Science
Mechanical Engineering
South Dakota State University, SD
Bachelor's of Science
Mechanical Engineering
South Dakota State University, SD
Siemens
Industrial Cybersecurity EngineerIntralox
Controls Engineer(Internship)
Simplimatic Automation
Mechanical Engineer(Internship)
Projects
Previous projects
5G Industrial
Robotics Testbed
5G Enabled Robotic Manipulators
Industry
-
Utilizing 5G technology in advanced manufacturing
-
Integrating Cloud Computing in network architecture and robot control
-
Exploring Computer Vision and Lidar sensing for robot navigation.
Neural
Network
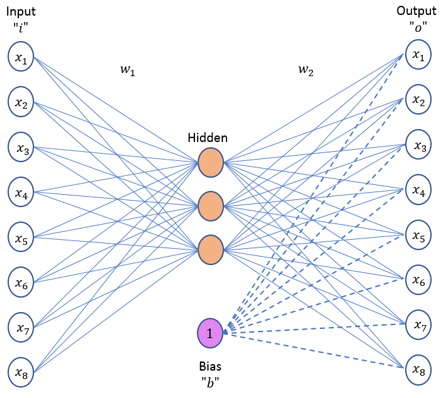
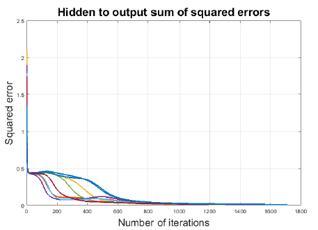
Neural Network
-
Implemented a NN with backpropagation algorithm to recognize a set of eight binary numbers.
-
Architected the NN as an 8-3-8 network with 1 hidden bias
-
This project was done on MATLAB.
-
Project LINK
SmartGate®
Intralox
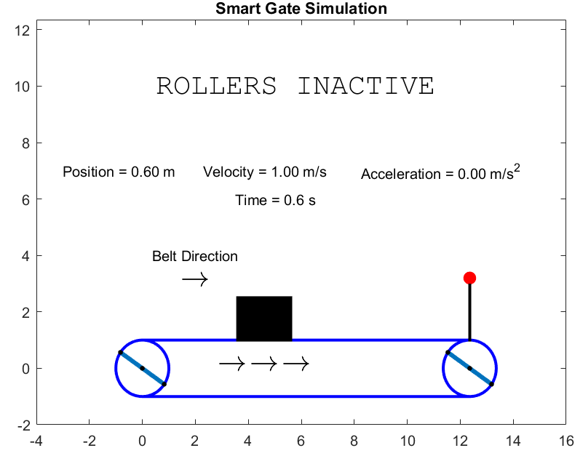
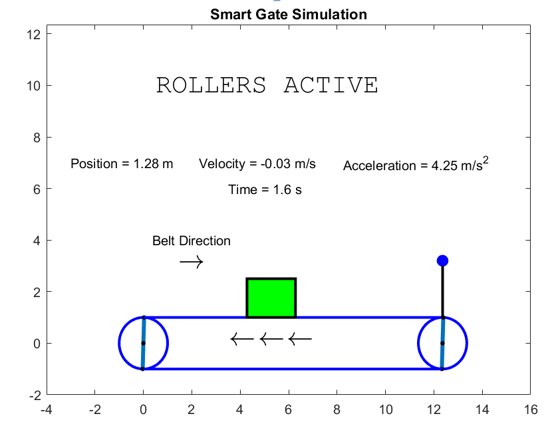
SmartGate®
Modeling & Simulation
-
Mathematically modeled the dynamics and kinematics of the SmartGate®
-
A conveyor that keeps packages stationary if desired while never stopping the belt
-
Implemented the dynamics and animation on MATLAB
-
Project Video LINK
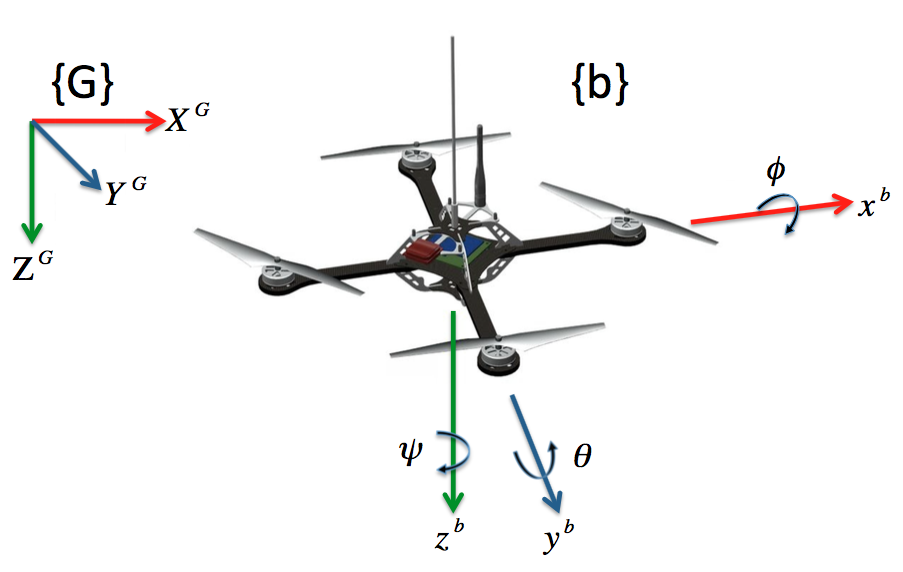
Quadrotor
Control
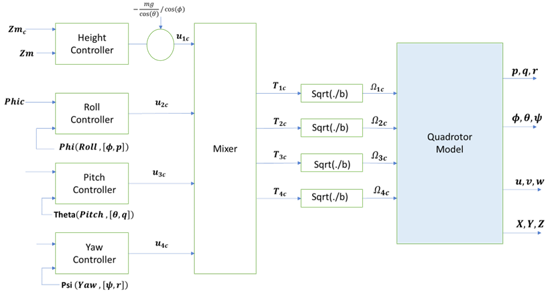
Quadrotor
Dynamics and Kinematics Implementation
-
Implemented the dynamics and control laws of UAV on SIMULINK
-
Designed a PI controller for position tracking
-
Designed the drone on SolidWorks and assembled all electrical components
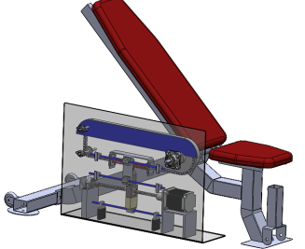
Series Elastic
Actuator
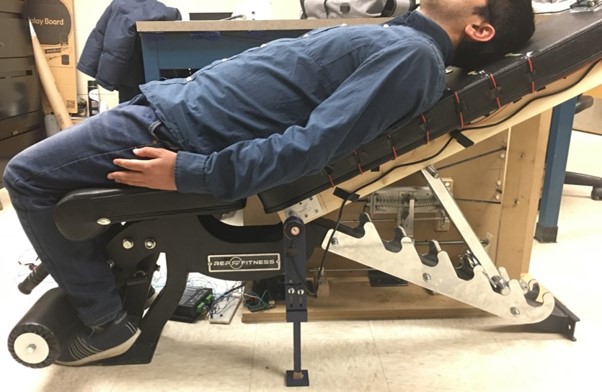
Series Elastic Actuator
-
Implemented a SEA with two springs, gears, and stepper motor
-
Designed and fabricated a full-scale model with a sit-up bench
-
Experimental setup was designed with a human subject for clinical data
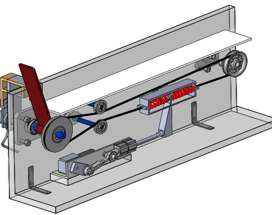
Small Scale
Ealstic Actuator

Small Scale
Elastic Actuator
-
Designed and fabricated a small-scale model based on the concept of SEA
-
Created a Mathematical model to simulate the torque behavior of the mechanism
-
Used Franka-Emika 7-axis robot to test the torque behavior under several configurations
Publications
Journals & Conferences
Brachiating Robot
Analysis and Design
In this paper, we investigate the mechanics of gibbons and represent its dynamics by a mechanical system.
View Paper
A Series-elastic Robot
for Back-pain Rehabilitation
This paper addresses the robot-assisted rehabilitation of back pain, an epidemic health problem affecting a large portion of the population.
View Paper
Optimization of a Chemical
Reaction Using the MQA
In this work, we revisit the Modified Quasilinearization Algorithm (MQA) as a method to solve Nonlinear Programming Problems.
View Paper
Motion Planning
for Nonprehensile Manipulation
This paper discusses the tipping condition for an object in nonprehensile manipulation under which the object can be accelerated while maintaining stability.
View Paper
Deep Reinforcement Learning Algorithms for Multiple Arc-Welding Robots
(Peer Review)This work discusses the applications of the deep reinforcement learning method to achieve arcs welding by multi-robot systems.
View Paper
My Masters Thesis
In this thesis, we explore rehabilitation robots, brachiating robots, optimization techniques, and MLP neural networks.
View Paper
Engineering Research
Review 2020
Feautered in SDSU's research magazine during my graduate program regarding my master's thesis the elastic rehabilitation robot.
View Paper